

This website uses cookies to improve your experience. We\'ll assume you\'re ok with this, but you can opt-out if you wish. Read More
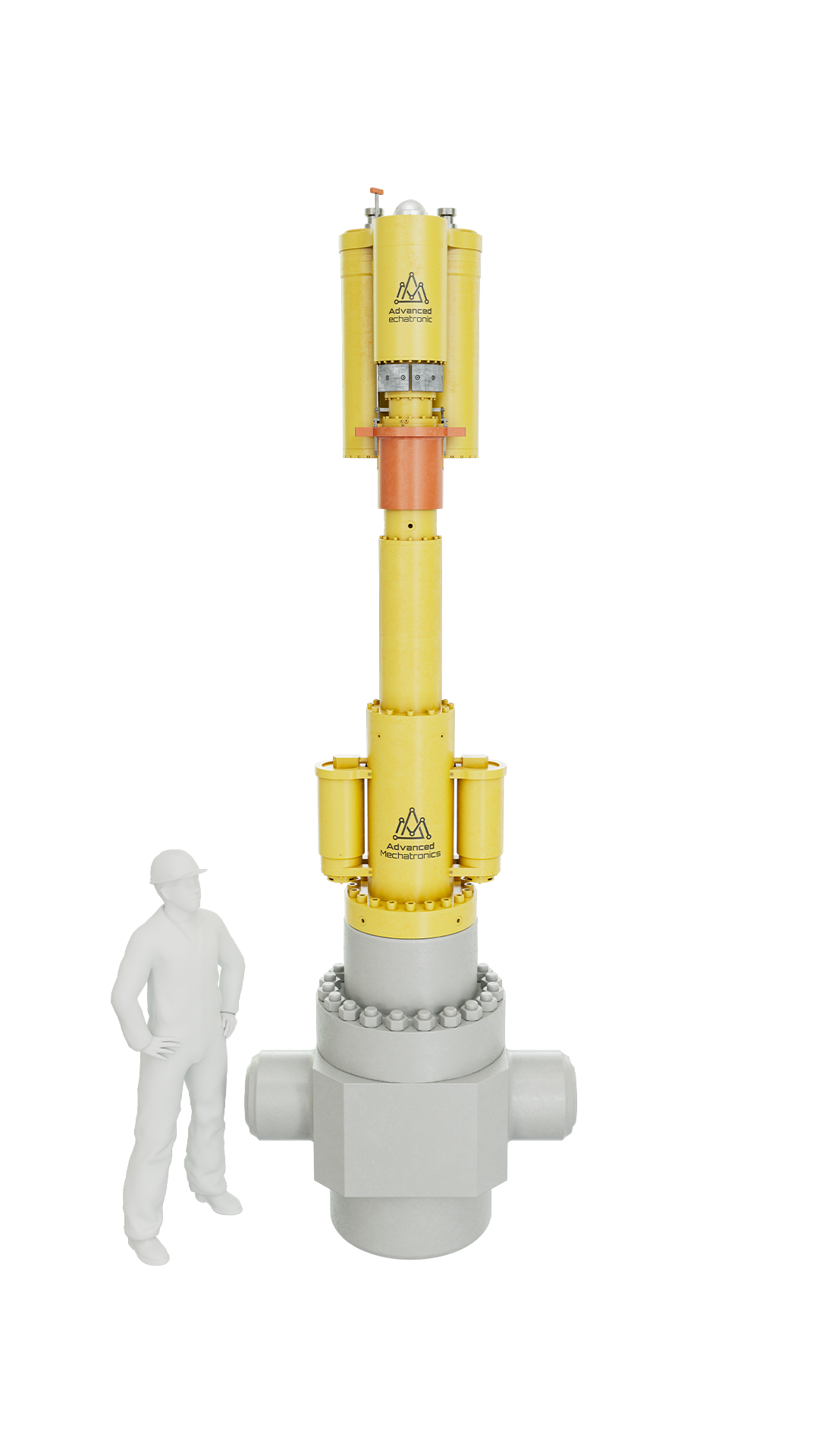
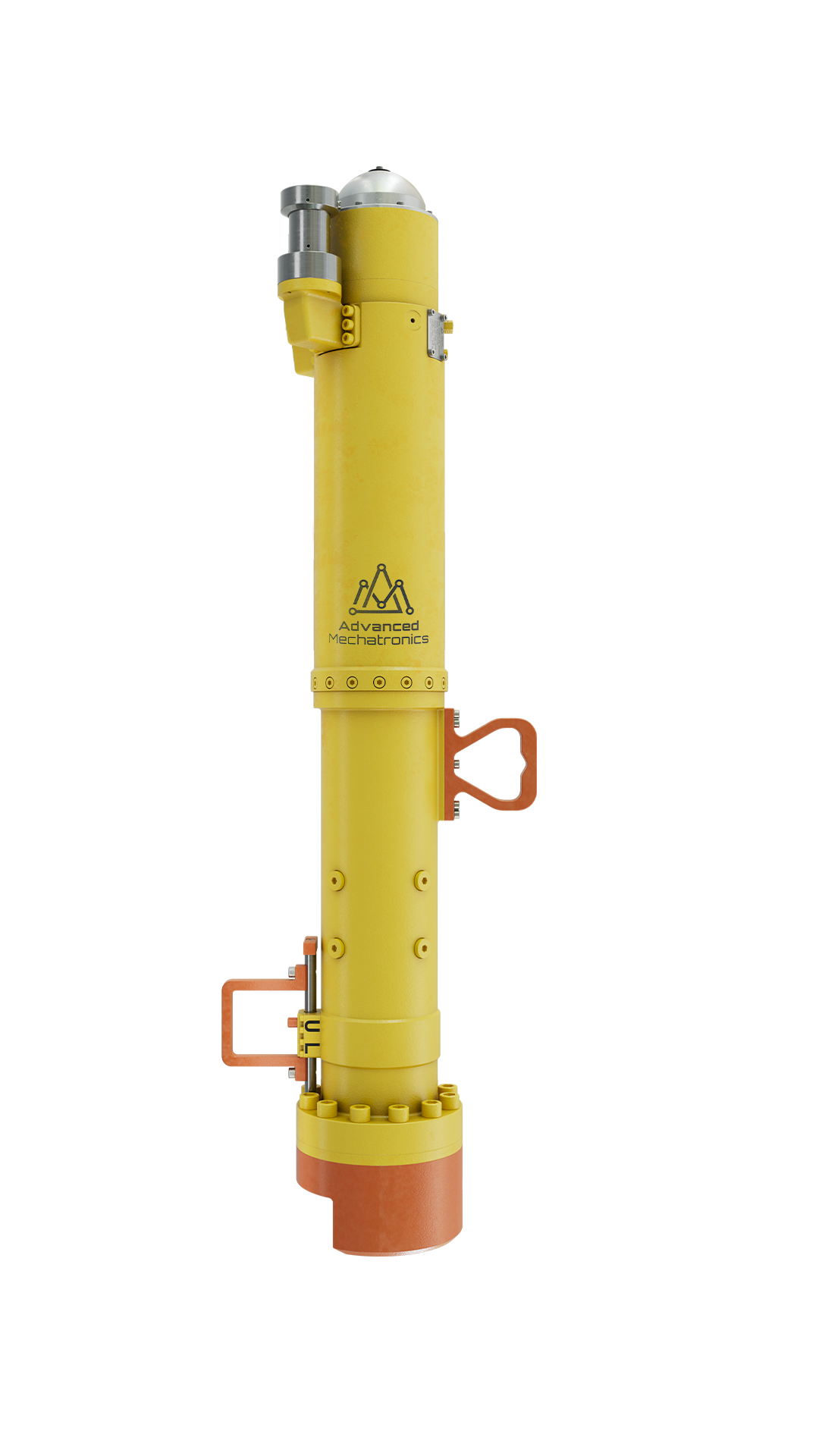
SEAVO-L 10″


Main Features
High efficient movement conversion
The RLM (Rotary to Linear Mechanism) of the SEAVO-L converts rotary movement to linear. The high efficiency enables the RLM to be driven by the ROV Class 7 interface.
Standardized Interface
The ROV Class 7 interface is used to provide the torque to the RLM.
Advanced Soft Landing
An integrated soft landing function ensures the reduction of the force before the endstop of the Valve is reached.
Position Indication
The integrated position indicator provides a feedback of the actual position of the valve visually.
Technical Specifications
Nominal Breakout Torque
Maximum Speed
Maximum Stroke
Water depth
Weight in water